Nullmax亮相黑芝麻智能BEST TECH Day,解读BEV与量产行泊一体
发布时间:2023-04-12
4月7日,Nullmax首席科学家成二康博士出席黑芝麻智能举办的BEST TECH Day 2023大会,并在智能汽车高峰论坛带来专业分享,畅谈行泊一体爆发趋势下,Nullmax如何基于Transformer打造BEV量产应用,赋能行泊一体方案加速落地、持续进化,以技术创新驱动智能驾驶的大规模普及。
近年来,以行泊一体为代表的智能驾驶方案在行业内深受欢迎,尤其是2022年,中国市场的行泊一体应用迎来巨幅增长。在汽车智能化竞争日趋激烈的当下,行泊一体已然处在市场爆发的前夕。行泊一体相比于传统的行泊分离架构,具有天然的成本优势,域控的整合、SOC的减少,不仅优化了汽车的硬件架构,也让智能驾驶的总体硬件成本大幅降低,因此行泊一体被看作是提升车型竞争力的重要手段。与此同时,随着芯片等硬件逐渐成熟,相应行泊一体域控制器的陆续量产下线,也为行泊一体量产上车打下了坚实基础。在此基础上,如何通过软件算法促成行泊一体应用的实质性落地,甚至进一步降低成本和提升体验,也就成为了智能驾驶走向普及的关键。Nullmax致力于实现自动驾驶的大规模商业化应用,提出了软硬件深度融合的行泊一体4.0形态,并推出了相应的MaxDrive行泊一体平台化方案,通过计算资源充分共享、传感器深度复用的方式,帮助智能驾驶「增效降本」。归功于Nullmax在上层应用算法、中间件、云端数据系统等方面的深厚积累,MaxDrive行泊一体方案可以将行车、泊车功能整合为一套系统,并部署到单SOC的一体式域控制器上实现量产应用。同时,凭借包括BEV感知、Transformer网络在内的创新技术,MaxDrive能够在各种硬件配置下实现业内一流的智能驾驶体验,并更快完成高质量方案的交付。
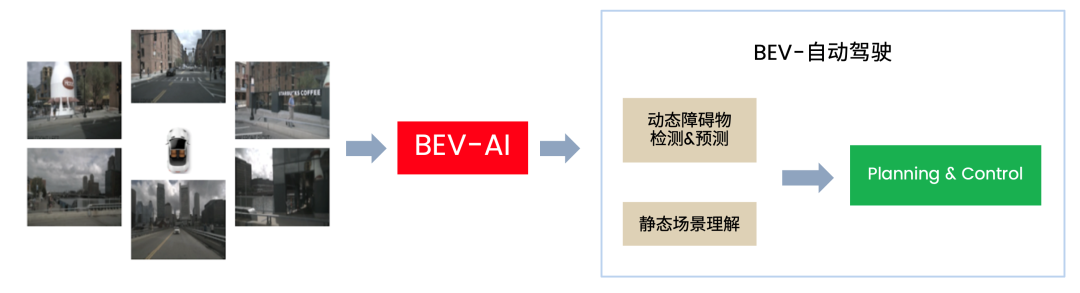
成二康博士介绍,Nullmax对BEV和Transformer有着深入的研究与长期的实践,打造的平台化BEV-AI技术架构,能够同时支持行车、泊车功能,并且具有超长感知距离、面向部署优化等优点,可以为量产车型提供包括行泊一体在内的BEV应用。此外,Nullmax的这套BEV-AI技术架构既能支持包括德州仪器TDA4、英伟达Orin、黑芝麻智能华山系列等芯片在内的不同算力平台,也能自动化适配所有的传感器量产配置,大幅提升量产部署时的效率,为各种行泊一体应用的实际落地提供最大程度的便利。
BEV + Transformer,助力行泊一体体验升级
作为自动驾驶领域的技术热点,BEV + Transformer的研发和落地如今已经成为行业内外多方关注的焦点。Nullmax很早就在这方面开展了许多工作,尤其是在BEV-AI技术架构当中,融入了大量Transformer的研究成果。成二康博士介绍,Nullmax将自动驾驶感知分为两个方面,一是静态场景的理解,二是动态障碍物的检测、预测。这是Nullmax最早开始BEV-AI研发的环节,也是率先应用Transformer的环节,比如基于Transformer的BEV语义分割算法BEVSegFormer,基于Transformer的3D车道线检测算法CurveFormer,均取得了业界最优(SOTA)的算法效果。BEVSegFormer可以用于实时构建高精度的局部地图,将自动驾驶的场景扩展至任意道路,包括全国各地的城乡道路,而且支持任意的相机配置,不依赖相机参数。CurveFormer则是可以在不显式构建BEV的情况下,直接输出3D车道线结果,加速计算、便于部署,即使在低算力条件下也能满足复杂场景的车道线检测要求。
除此之外,Nullmax在BEV感知方面的具体应用还有车道识别、3D目标检测、3D障碍物融合等方面。这些BEV感知技术,大部份已经投入到实际的量产项目当中,部分已经在去年、今年的项目中实现交付。在规控方面,Nullmax开展了BEV Planning的研究并推进落地,以支持城市路段的自动驾驶。在不依赖高精地图的情况下,面对路口、无车道线、人车行为复杂等场景,通过BEV Planning也可以实现自动驾驶。论坛上,成二康博士还介绍了MaxDrive的自主成长系统,背后的数据平台,以及Nullmax的数据集开源工作。通过贯通车端、云端的高效数据闭环,Nullmax将持续推动自动驾驶技术的持续迭代,以及量产方案的长期升级。当前,Nullmax已和多家汽车厂商、一级供应商、芯片厂商建立了深度合作关系,产品技术获得了业内广泛认可。所打造的自动驾驶方案,在不同算力区间的芯片平台上实现了落地。未来,Nullmax将继续扩大合作生态“朋友圈”,共同推动先进技术的商业化落地。