在越来越多的新车上,智能驾驶已经成为了必不可少的配置,无论高端车型还是入门车型,都在竭尽全力为自己的用户带来更多、更好的智能化体验。而这,也为新时期的汽车品牌带来了更多的技术挑战。比如,如何识别更加多样的目标,如何感知更远的距离,如何重建更真实的三维世界,并且做到实时性更好、依赖度更低、成本更经济,等等。在所有这些挑战的背后,视觉感知都可谓是最难攻克的环节之一。
为此,Nullmax在平台化行泊一体方案「MaxDrive卓行」的基础上,面向行业推出了平台化的视觉感知产品「MaxVision远见」,通过核心的「远见卓行」产品矩阵满足市场的多样化量产需求。

Nullmax的MaxVision产品不仅获得了多家厂商的量产订单,而且已经率先基于TDA4、Orin平台开启了交付和应用,助力智能驾驶走向普及。
一直以来,感知作为自动驾驶的上游环节,都是整个自动驾驶系统的重中之重。感知信息的多寡,直接决定了自动驾驶功能的多寡;感知质量的高低,直接影响了各项功能的性能;就连感知环节的计算需求,也从根本上决定了计算平台的选择。而在这关键的感知环节当中,视觉感知正是最核心的技术组成。自动驾驶系统的正常工作,有赖于视觉信息的输入,几乎所有的自动驾驶量产应用,也都是采用视觉为主、多传感器融合的感知系统。视觉感知的好坏,紧密关联着整个自动驾驶系统的表现。
尤其是视觉感知,可以提供所有自动驾驶必需的感知信息,就像人类可以凭借双眼感知完成所有的驾驶感知一样,非常的全能和高效。视觉信号本身可提供丰富的环境纹理和语义信息,且可从中获得一定的三维结构信息,加上极其成熟的相机传感器仍在快速发展,量产计算平台的算力极速上升,因此在计算机视觉技术持续且快速的进步下,视觉感知的作用和优势也变得越来越大。比如,通过更加强大的目标检测、分割算法,全面理解环境中的各种静态元素——车道线、停止线、红绿灯、限速牌、锥形筒、停车位等等,准确检测和预测周围的各种动态障碍物——机动车、非机动车、行人、动物等等。再比如,通过基于视觉感知的实时建图,可摆脱对高精地图的依赖。这样的例子,数不胜数。
面向现在和未来,无论是为汽车推出丰富多样、层出不穷的新鲜功能,还是通过持之以恒、不断优化的方式提升各项性能,出色的视觉感知技术都是至关重要。
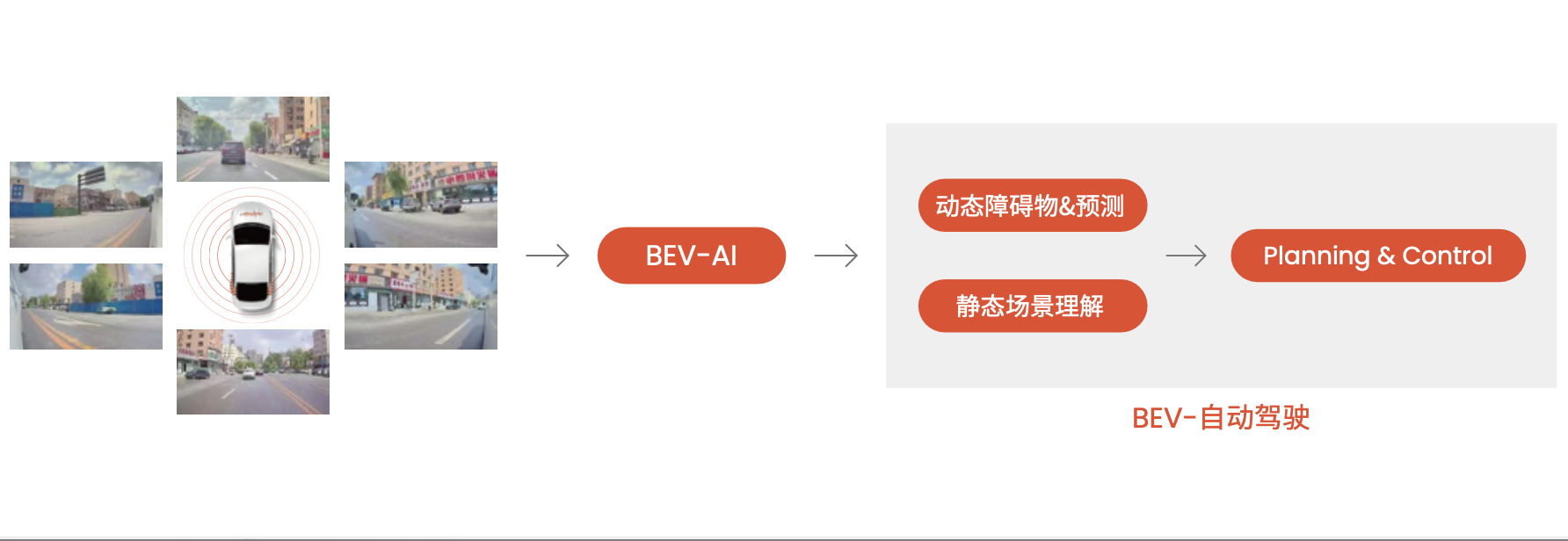
在自动驾驶量产应用当中,视觉感知的开发和部署是一项周期极长、难度极大的工作,需要投入大量的人力和时间,才可能形成一些基础的功能。但是通过Nullmax平台化的MaxVision视觉感知产品,汽车厂商可以快速实现高质量的智能驾驶落地,在各款车型上部署深度自研的行泊一体应用。MaxVision完全贯彻了Nullmax的BEV-AI技术架构,具有实现复杂场景L4应用的技术潜力。在量产项目中,MaxVision能够灵活提供包括前视感知、周视感知、环视感知和感知融合等在内的视觉感知技术,满足高阶行泊一体到传统ADAS的不同应用需求。
对于仅有前视需求的用户来说,MaxVision可以提供性能顶尖、可靠鲁棒的前视感知量产算法,在单相机、两相机、三相机的不同配置下,支持所有类型的感知任务。前视感知作为自动驾驶感知的绝对主力,最大的特点是任务多、要求高,MaxVision在最低2T算力情况下,就可以实现L2功能的前视感知。
对于配有周视相机的车辆来说,MaxVision可以提供出色的周视感知能力,性能指标媲美前视,帮助车辆检测周围360度的障碍物情况,实现复杂的智驾应用。周视感知的主要难点在于,利用少量算力驱动多颗相机高效输出有用的感知信息。比如Nullmax去年交付的量产周视感知,就是基于8T算力驱动4颗周视相机实现了20FPS帧率的大范围实时3D检测。
同时,MaxVision还包含了面向环视鱼眼相机的环视感知算法,强化行车和泊车场景下的近距离感知能力。泊车的时候,环视感知可以提供车位检测、障碍物检测、视觉建图及定位等应用;行车的时候,环视感知可以用来提升拥堵跟车、侧面cut-in等情况的处理能力。
在实际的量产应用中,MaxVision能够根据需求和硬件情况配置相应的感知算法模块,并融合各结果形成准确、统一、鲁棒的感知输入。比如,为配置全面、算力充足的车型,提供前视+周视+环视的360°远中近距离多重感知覆盖;又或者,为配置较少、算力较低的车型提供前视+环视的基础行泊一体感知。
随着智能驾驶量产进程的不断提速,视觉感知的市场需求急速增长,并且技术要求也越来越高。相比于大多数的视觉方案,MaxVision拥有非常全面的量产优势,能够助力行业客户实现一系列性能优越的落地应用。作为平台化的视觉感知产品,MaxVision的特点是算法极为齐全,功能应有尽有。从全场景、点到点的高阶行泊一体,到最基础的ADAS,所需的感知功能都可以在MaxVision中找到,并且对应有不同性能、不同类型的算法选项,满足不同计算平台的部署需求。比如关键的动态障碍物检测功能,就可以通过2D目标检测、3D目标检测、BEV 3D目标检测等不同算法单独实现或者共同实现。
同时,MaxVision可以高效、灵活地部署到多种传感器配置和计算平台,给予客户最大程度的「硬件自由」。借助于平台化的感知基础模型架构,MaxVision可以自动化适配相机配置,不需要因为相机数量、位置、内部参数等因素的变化而大幅调整算法和架构。而深厚的算法储备,也为不同算力、算子和处理器核心下的量产部署,提供了多样化选择。 尤为重要的是,MaxVision能够实现真正高效的落地,用更短的开发周期,交付更高质量的产品应用。面对新项目时,MaxVision可以直接剪裁所需的感知模型架构并选择相应的算法,然后通过紧密配套的数据采集、标注,以及模型训练、评估、部署、升级机制,快速、高规格地完成方案的交付。并且得益于先进的感知架构和高效的数据闭环,方案中的算法模型也能取得更好的训练效果、推理效果。
强大的视觉感知技术,能够帮助汽车更好地认知复杂的物理世界,进而开发出各种实用、好用的智能驾驶功能。MaxVision所具备的「好眼力」,正在通过一个又一个的量产项目,助力更多的车型实现智能进化。
尤为重要的是,MaxVision能够实现真正高效的落地,用更短的开发周期,交付更高质量的产品应用。面对新项目时,MaxVision可以直接剪裁所需的感知模型架构并选择相应的算法,然后通过紧密配套的数据采集、标注,以及模型训练、评估、部署、升级机制,快速、高规格地完成方案的交付。并且得益于先进的感知架构和高效的数据闭环,方案中的算法模型也能取得更好的训练效果、推理效果。
强大的视觉感知技术,能够帮助汽车更好地认知复杂的物理世界,进而开发出各种实用、好用的智能驾驶功能。MaxVision所具备的「好眼力」,正在通过一个又一个的量产项目,助力更多的车型实现智能进化。