高效量产有诀窍,感知平台化很重要 | Nullmax进化学
发布时间:2023-08-30在Nullmax看来,通过平台化将自动驾驶所需的绝大部分软件算法,尤其是核心的、复杂的算法模型,整合为一套支持不同车型的平台型软件,可以免去大量低价值的重复开发,大幅提高量产速度和质量。而感知作为最关键的上游环节,它的平台化是整个平台化工作的重中之重。
为此,Nullmax打造了涵盖L2+及L4感知任务的平台化感知架构,它可以支持大算力、小算力的不同计算平台,也能自动适配不同的传感器配置,为行泊一体等产品应用的高效落地提供核心的技术支撑。
细说感知平台化

平台化有利于提升量产的质量和速度
比如在商业层面,感知平台化可以将量产的边际成本压缩到极致,从而在不大幅增加人员和投入的情况下,完成大量新车型上的应用。这可以帮助自动驾驶形成真正成熟可闭环的商业模式,尤其是量产需要关注单位车型、单位功能的研发成本,平台化能最大程度地帮助车厂分摊各项成本。
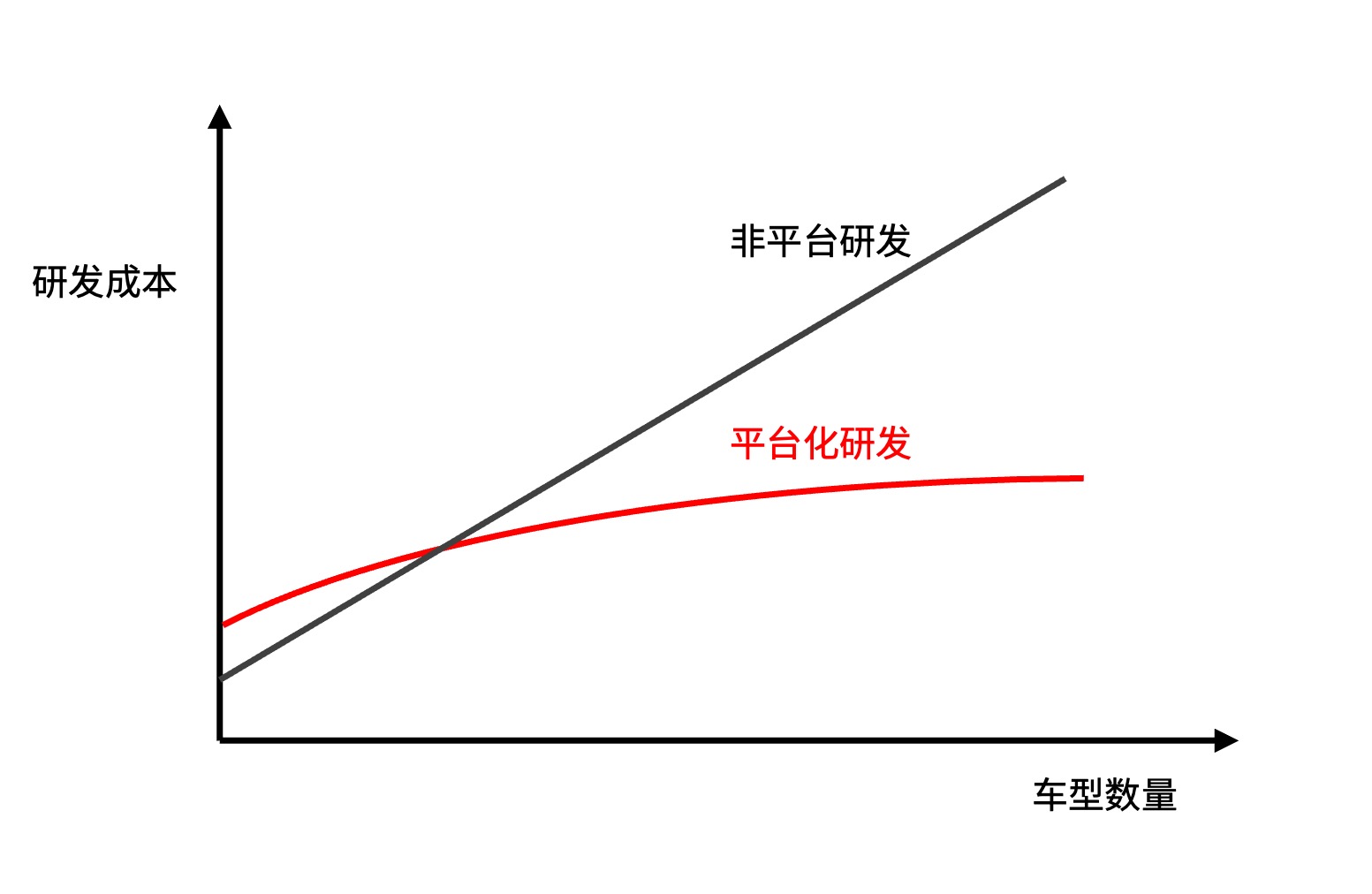
平台化可显著降低应用的边际成本
多样差异带来巨大挑战
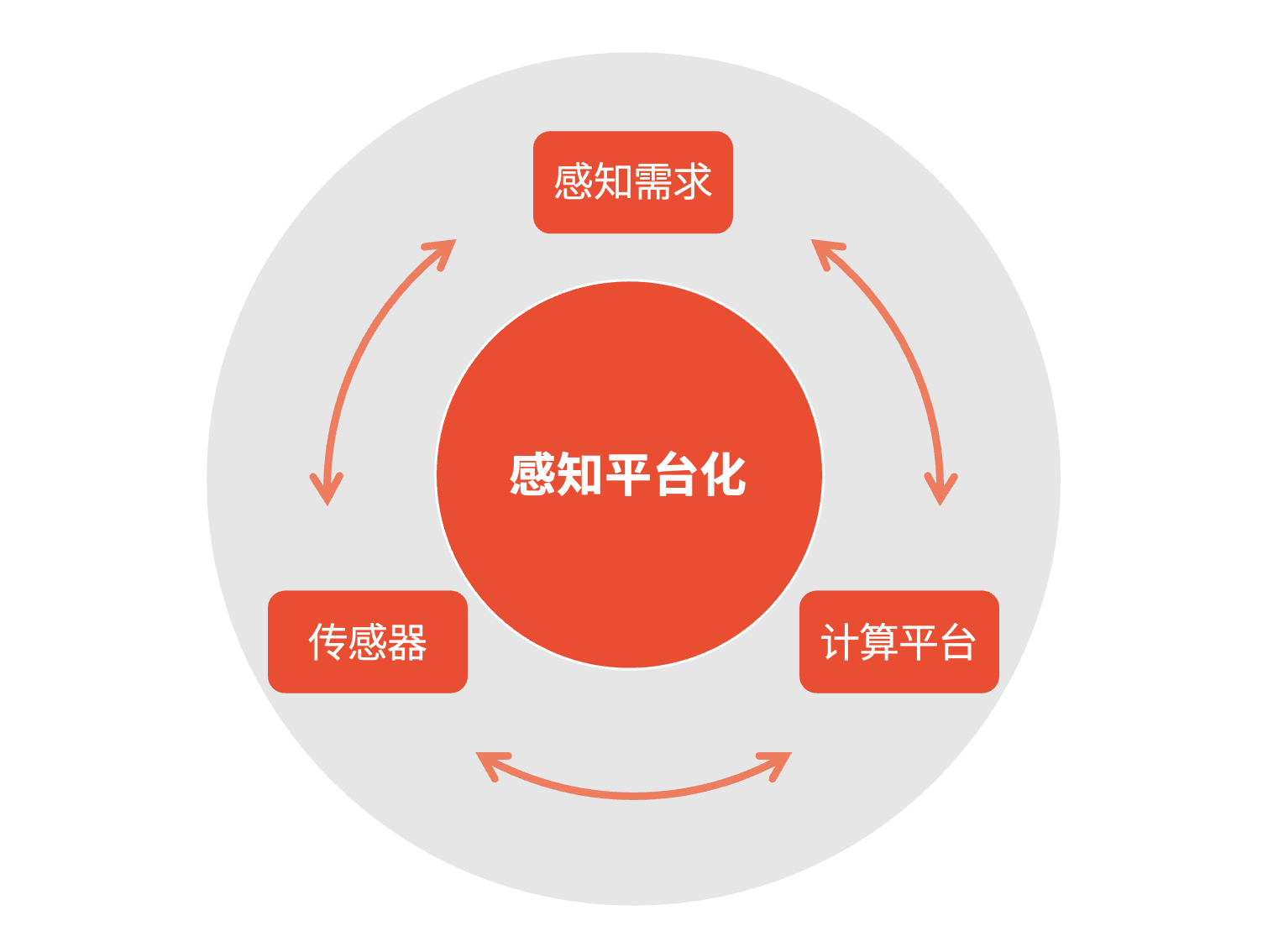
平台化需充分考虑需求和硬件差异
另外,算法服务于具体的功能,因此感知平台化需要考虑不同算法以实现各种功能需求。比如一些基础功能只需要2D的车道线检测、障碍物检测,但是一些高阶功能需要3D的检测算法,还有稠密深度图等等。并且有的厂商还会开发一些特色功能,比如轨迹参考线、360°障碍物检测等等,那么可能会用到BEV感知、BEV规划等算法。
显而易见,感知平台化是一项难度极大的系统性工程,但在突破了这些难点之后,自动驾驶量产也能取得巨大的效率优势,在商业和技术上走得更远。
BEV-AI架构实现感知平台化
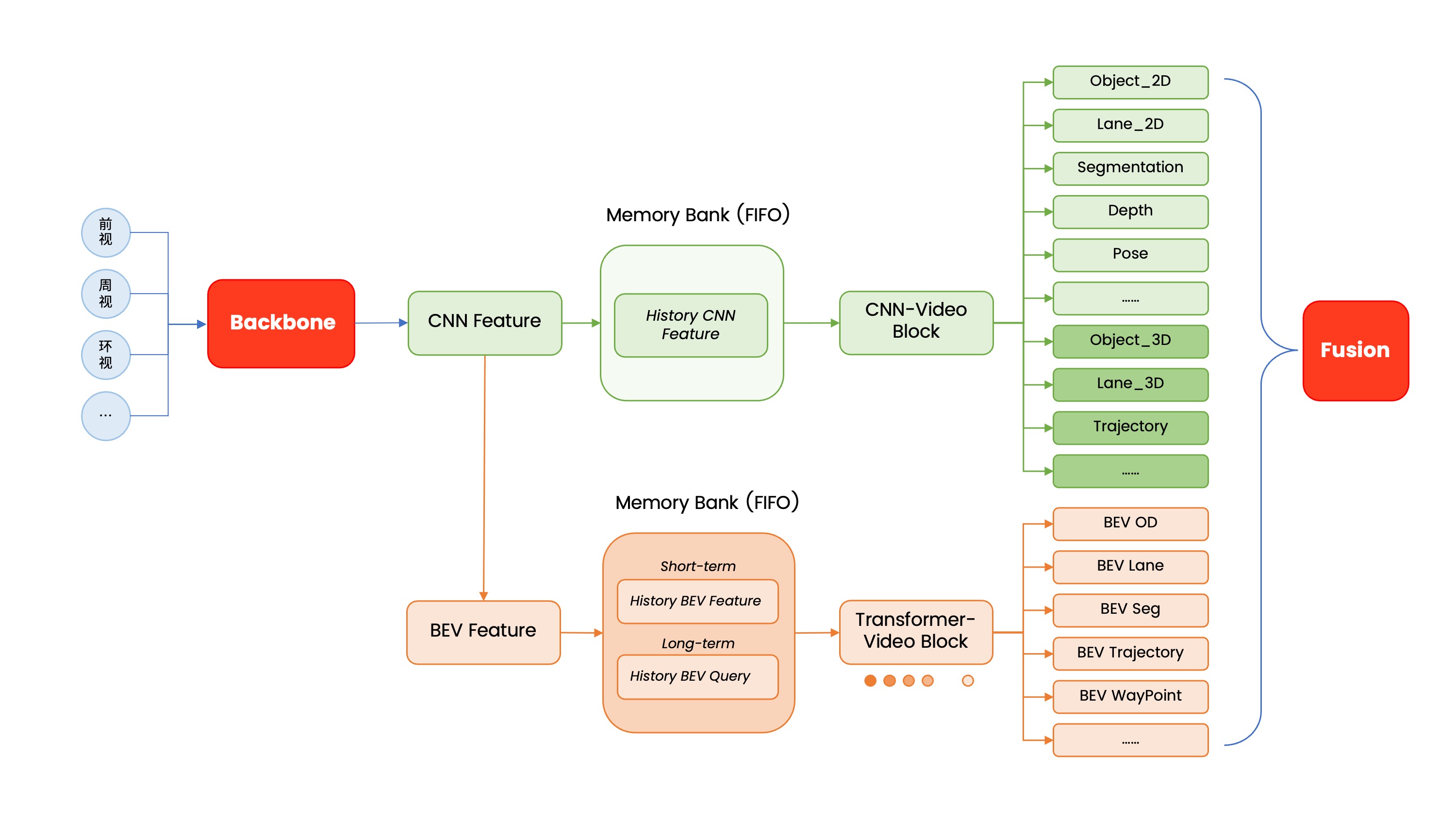
Nullmax感知平台化的模型架构示意
Nullmax感知模型架构的一大特点是存在很多功能重复的任务分支,这可以帮助网络取得更好的训练效果,从而实现更好的算法性能。因为在多任务共同训练的时候,不仅每个任务分支能帮助主干网络学习新的知识,分支之间也能起到相互促进的作用,胜过单独训练的方式。
比如,基于CNN的2D目标检测、3D目标检测和基于Transformer的BEV目标检测,基于CNN的2D车道线检测、3D车道线检测和基于Transformer的BEV车道线检测、BEV分割,这些任务之间高度相通,那么共同训练时可以在知识上互通有无,帮助彼此达到更好性能。
而且很关键的是,Nullmax的冗余分支设计可以确保每种任务有两到三个的输出信号,当中有的分支算力要求较高,有的要求较低,这样在实际部署时就可以灵活选择。
因此,基于这套感知平台架构,Nullmax既可以提供高算力方案,功能体验瞄准L4,又可以提供中低算力方案,满足主流L2+功能需求。典型例子就是Nullmax的MaxDrive行泊一体方案,既可以部署在大算力的Orin平台上,也可以基于8T算力的TDA4VM平台量产,各个算力区间都能有最优的功能选择。
在算力非常充沛的情况下,这个架构可以不做裁剪,完整部署。既以CNN网络完成感知输出,又以Transformer网络完成感知输出。不同网络的结果,融合之后作为最后的感知结果,确保整个系统的准确性、鲁棒性和冗余性。
如果算力较低,比如一些仅有前视相机的方案,那么可以只保留主干网络和部分任务分支,去掉其他任务,推理时仅运行前视部分,然后完成感知融合。而在极限情况下,比如2T的芯片上,那么可以仅保留2D车道线检测和2D目标检测,并对主干网络进行剪枝,也能组建一套极简的感知方案。
另外,Nullmax也同步构建了One Cycle形态的数据闭环,与One Model形态的模型架构搭配协同。这样在完成量产部署之后,Nullmax感知平台输出的不同方案可以通过同一套数据闭环高效汇流,回传知识给共用的主干网络和关联的任务分支,让整个感知基础模型变得更加强大。
结语
媒体垂询
media@nullmax.ai相关文章
- Nullmax VLA 算法深度赋能黑芝麻华山 A2000,释放高阶智驾潜能 2026-01-06
- 普适产品进阶 | Nullmax 一体机/小域控的“超感视觉” 2025-11-19
- Nullmax获TISAX®最高AL3认证,信息安全拉至全球顶级标准 2025-07-09
- 再获车企认可!Nullmax 辅助驾驶产品获国内头部车企车型定点 2025-06-23
- Nullmax进化学 | 让AEB系统回归驾驶安全本质 2025-05-30