入选CVPR 2024!Nullmax 提出多相机3D目标检测新方法QAF2D
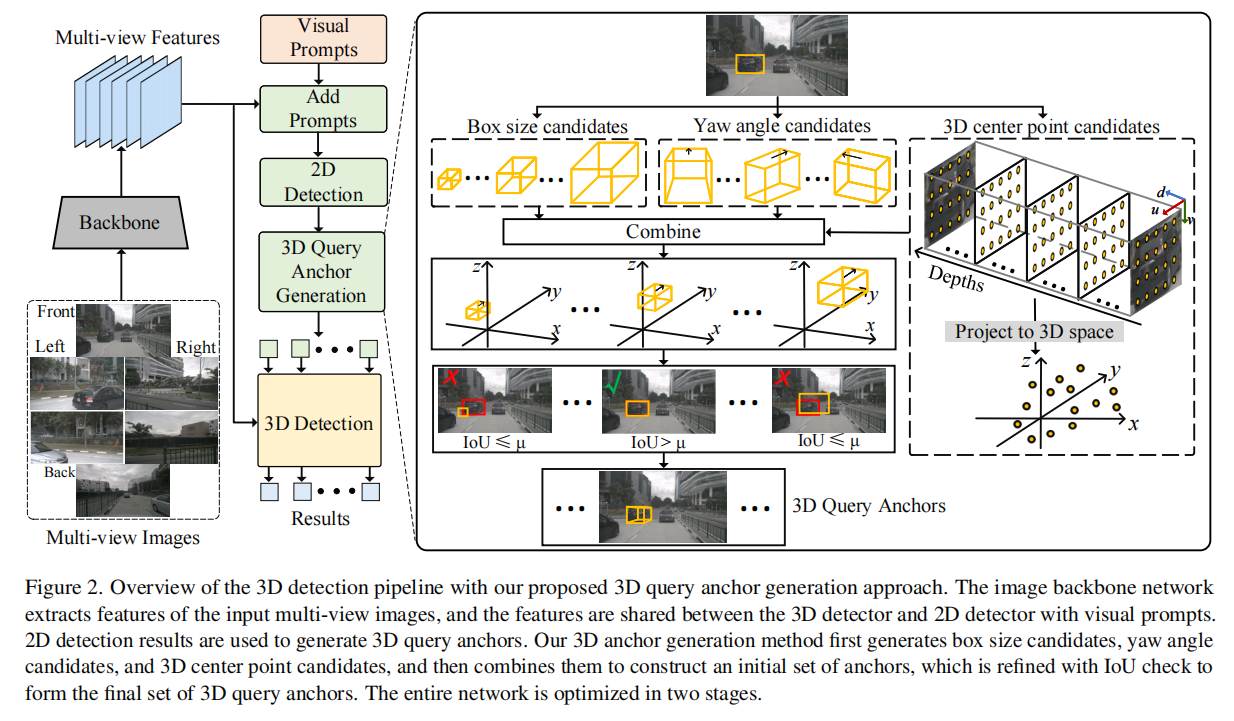
发布时间:2024-02-27论文中,Nullmax提出了一种提升3D目标检测的新方法QAF2D(Query Anchor From 2D),通过2D检测结果指导生成3D查询锚点(Query Anchor),显著提升了多相机3D目标检测的性能。同时,Nullmax利用视觉提示(Visual Prompt)设计了一套两阶段的优化方法,让2D和3D检测器共用图像特征提取网络,在不影响3D检测器性能的情况下,降低模型训练和部署的资源消耗。
作为一家专注于自动驾驶应用的人工智能科技公司,Nullmax拥有强大的技术团队和优秀的研发实力,未来Nullmax将继续探索3D目标检测的最新技术,不断提升感知系统的性能和鲁棒性,将研究成果应用于实际场景,为自动驾驶技术的落地贡献力量。
媒体垂询
media@nullmax.ai相关文章
- 【斩获丰盈】见证 Nullmax 新近摘星时刻 2025-01-22
- 创新引领,荣耀加冕 | 见证Nullmax的新近「高光时刻」 2024-12-31
- 聚光时刻 | Nullmax荣获2024第六届金辑奖 2024-10-25
- Nullmax荣登「毕马威中国2024领先汽车科技企业50榜单」 2024-09-06
- Nullmax进化学 |「纯视觉」眼中的世界,有亿点点震撼 2024-08-26